Infravörös és látható kép egyszerre a képernyőn
Fúziós technika hőkameráknál
Az Infrared Solutions, Inc., a Fluke vállalat, kifejlesztett egy új infravörös technológiát, az IR-Fusion™ nevű technológiát, amely képpontról pixelre keveri a látható és infravörös képeket egyetlen kijelzőn. Ez a cikk a szabadalmaztatás alatt álló, újszerű, alacsony költségű megközelítést írja le a parallaxis probléma megoldására a külön látható és infravörös optikából származó képek kombinálásával.
Háttér
Számos oka lehet annak, hogy a látható képek általában élesebbek és tisztábbak, mint az infravörös képek. Az egyik az, hogy látható szenzortömbök készíthetők kisebb detektorelemekkel és sokkal nagyobb számú elemmel. A másik, hogy mivel a látható képeket nem a hőmérséklet mérésére használjuk, a képeket csak visszavert sugárzással lehet előállítani, ami általában élesebb képet ad, mint a kibocsátott sugárzás.
A látható detektortömbök milliónyi elemet tartalmaznak, míg az infravörös detektortömbök sokkal kevesebbet. A Fluke FlexCam látható tömbje 1 360 000 detektorelemet tartalmaz, és infravörös tömbje 1/18-a (76 800 elem). Ennek eredményeként a látható kép sokkal részletesebb lehet, mint az infravörös kép. Ráadásul a látható képek ugyanolyan színekben, árnyalatokban és intenzitásban jeleníthetők meg, mint amit az emberi szem lát, így szerkezetük és jellegük könnyebben értelmezhető, mint az infravörös képek.
Bár az infravörös és látható kamerák képesek rögzíteni a céltárgyról kibocsátott és visszavert sugárzást is, a látható képeket szinte mindig a visszavert látható fény hozza létre. Ezzel szemben a hőmérséklet mérésére használt infravörös képeknek rögzíteni kell a kibocsátott infravörös sugárzást. A visszavert látható sugárzás éles kontrasztot hozhat létre éles szélekkel és intenzitáskülönbségekkel; például egy vékony fehér vonal feküdhet egy vékony fekete vonal mellett.
Lehetőség van éles infravörös visszaverődési kontrasztra is, ha alacsony emissziós (magas infravörös reflexiós) felületet magas emissziós (alacsony infravörös reflexiós) felület mellett helyezünk el. De szokatlan, hogy éles hőmérséklet-különbséggel rendelkező felületek vannak egymás mellett. A közeli tárgyak közötti hőátadás kimoshatja a hőmérsékleti különbségeket azáltal, hogy hőmérsékleti gradienseket hoz létre, ami megnehezíti az éles szélű kibocsátott sugárzás képeinek készítését. Ez egy másik oka annak, hogy a hőmérséklet mérésére használt infravörös képek általában kevésbé élesek, mint a látható képek.
Az iparnak olyan kamerára volt szüksége, amely képes olyan képet rögzíteni, amely a látható kép részleteit és az infravörös kép hőmérsékletének mérését mutatja. A legtöbb operátor duplikált képeket készített, egy látható fényt és egy infravörös képet, de a képek korrelációja néha megbízhatatlan volt. Az igazi szükség az volt, hogy a két kép automatikusan fedje egymást.
Az egyik javaslat az volt, hogy a látható és az infravörös kamerát egy műszerben kombinálják egymás mellett, így mindkét kép egyszerre készül, de a térbeli korreláció a parallaxistól szenvedett. Jól működött nagy távolságokon, ahol a parallaxis elhanyagolható. De az olyan alkalmazásoknál, mint a prediktív karbantartás és az épülettudomány, ahol a kamerát rövid vagy közepes távolságra használják, a parallaxis probléma.
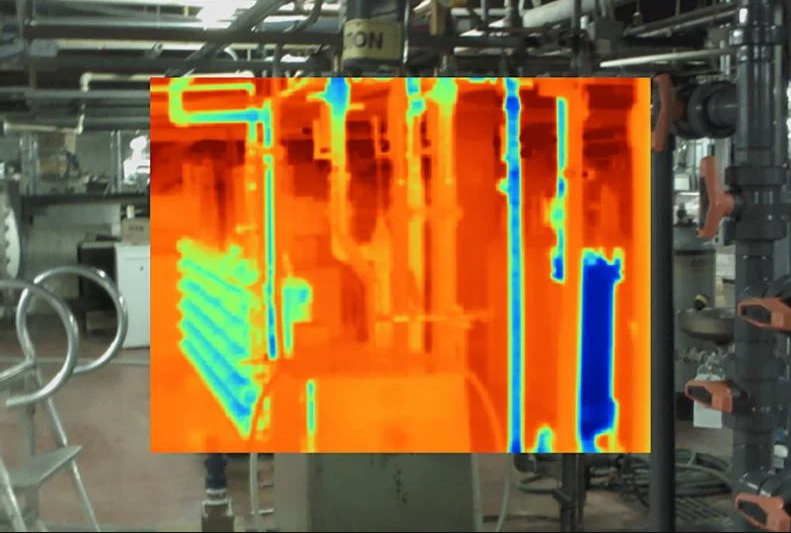
Csak infravörös látható Csak 50/50 keverék

Vegyes látható és infravörös képek
Az IR-Fusion technológia a videó sebességű infravörös kamerát egy videósebességű látható fény kamerával kombinálja egyetlen eszközben, így a jelenet látható és infravörös sugárzásban is megtekinthető és rögzíthető. A látható kép automatikusan regisztrálásra kerül (parallaxisra korrigálva), és az infravörös képhez igazodó méretre kerül, így az infravörös és a látható jelenet egymásra fedhet a kamera kijelzőjén. A kezelő választhat, hogy a látható képet önmagában, az infravörös képet önmagában vagy a kettő kevert (összeolvadt) kombinációját kívánja-e látni. Lásd a példaképeket az 1. ábrán .
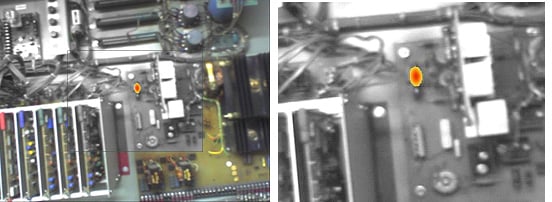
Mivel az infravörös és a látható képeket a kamera pixelenként egyezik, a kezelő könnyen azonosíthatja az infravörös érdekes pontok helyét a célponton azáltal, hogy megjegyzi, hol vannak a funkciók a kevert képen. Ha az infravörös kép fókuszban van, a kamera kezelője dönthet úgy, hogy csak a látható fényben lévő képet nézi, és a nem megjelenített, de a megfelelő infravörös képhez társított adatokból olvassa le a látható kép infravörös hőmérsékletét. Ennek egy példája látható az 1. ábra csak látható paneljén , amely a legforróbb pontot mutatja 121,7 °F-on.
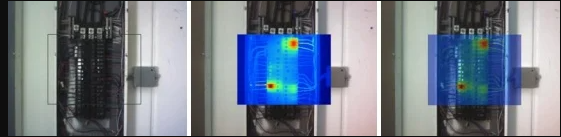
A kevert kép segítségével egy érdekes infravörös jellemző helye pontosan azonosítható még akkor is, ha az infravörös kontraszt alacsony, és az infravörös képen nagyon kevés a struktúra. A 2. ábrán egy lapos falon vagy mennyezeten egy rosszul szigetelt pont pontos elhelyezkedését segíti, ha egy kis látható foltot vagy nyomot látunk a kevert látható/infravörös képen.
Megjelenítési módok
A Fluke Ti4X és 5X IR-Fusion™ infravörös kamerák öt megjelenítési módban működhetnek; 1) Kép a képben, 2) Teljes képernyő és 3) Színes riasztások, 4) Alfa keverés és 5) Teljesen látható fény. Az első négy mód bármelyikében a hőmérséklet rögzítésre kerül, és megjeleníthető a kép infravörös részén.
Összekevert

Csak látható Infravörös Mérsékelt keverék
75 % IR Blend 50 % IR Blend 25 % IR Blend

Csak látható Infravörös 50/50 keverék
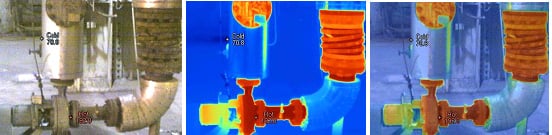
- Kép a képben mód ( 3. ábra ); Kép a képben módban a kijelző középső negyede csak infravörös, csak látható vagy a kettő keveréke. Csak a képernyő fennmaradó háromnegyede látható. Ebben az üzemmódban az infravörös kép mindig rögzített helyzetben, a kijelző közepén jelenik meg.
A 4. ábra egy kevert képet mutat különböző százalékos infravörös keveréssel. - Teljes képernyős mód; Teljes képernyős módban a kép a képben mód középső negyede tölti ki a képernyőt. A kép a képben módhoz hasonlóan a teljes kijelző lehet csak látható, csak infravörös vagy a kettő keveréke. Az 5. ábra a 4. ábrán látható infravörös jelenet teljes képernyős képe.
- Színes riasztási mód; A színes riasztási mód arra szolgál, hogy kiemelje azokat az érdeklődési területeket, amelyek megfelelnek a kamera kezelője által meghatározott hőmérsékleti feltételeknek. Három beállítás áll rendelkezésre; a) melegküszöb, b) hidegküszöb és c) abszolút tartomány.
- A forró küszöb módban a kép bármely pixele, amelynek hőmérséklete meghaladja a hőmérséklet-beállítást, infravörös színben jelenik meg.
- Hideg küszöb módban a kép bármely pixele, amelynek hőmérséklete egy hőmérséklet-beállítás alatt van, infravörös színben jelenik meg.
- Abszolút tartomány módban (izoterma) a kamera kezelője megadja egy tartomány felső és alsó hőmérsékletét is. Bármely pixel, amelynek hőmérséklete ebben a tartományban van, infravörös színben jelenik meg. Minden színriasztási módban a színeket az infravörös paletta kiválasztása, az intenzitást pedig az infravörös keverés mértéke határozza meg. A mód megjelenítése beállítható kép a képben vagy teljes képernyősre.
Hogyan történik a keverés
Az IR-Fusion™ technológia a valós idejű látható kamera motorját egy valós idejű infravörös kamera házába helyezi. Az elhelyezés olyan, hogy a látható optikai tengely a lehető legközelebb legyen az infravörös optikai tengelyhez, és nagyjából párhuzamos legyen az infravörös tengellyel a függőleges síkban. A parallaxis korrekciója érdekében az egyik kamera látóterének (FOV) nagyobbnak kell lennie, mint a másiké. A látható FOV-ot azért választották nagyobbra, mert a látható optika jelenleg olcsóbb, mint az infravörös optika, és a látható kamerák felbontása sokkal finomabb. Ezért a látható kép egy részének elvesztése a parallaxis korrekciós eljárás során a legkisebb hatással van a kamerára és a kevert képekre.
Az 1. ábra a kombinált infravörös és látható kamera optikai útvonalát és érzékelőkonfigurációját mutatja. Két különálló optikai út és két különálló érzékelő van; egy látható és egy infravörös. Mivel az érzékelők optikai útvonalai eltérőek, mindegyik érzékelő kissé eltérő nézetből „látja” a céljelenetet, ami parallaxis hibát okoz. Ezt a parallaxis hibát a kombinált képen elektronikusan, szoftveres beállításokkal korrigálják.
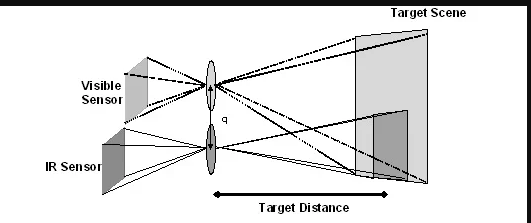
A látható optika olyan, hogy minden használható távolságban éles marad. Az infralencse alacsony f-számmal rendelkezik, és ennek eredményeként kis mélységélességgel rendelkezik, amely kiváló eszköz a cél távolságának meghatározására. Csak az infravörös objektívnek van szüksége a fókusz beállítására a különböző távolságú célpontokhoz.
Parallax korrekció
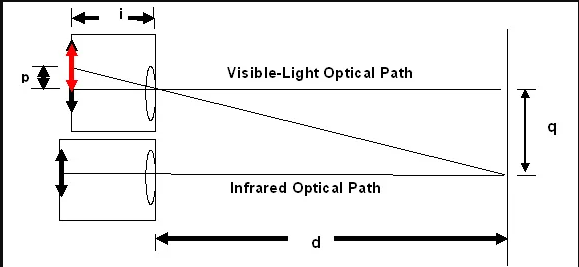
A parallaxis korrekció az infravörös fókusztávolságon alapul. A 2. ábra geometriailag mutatja a parallaxis egyenlet levezetését.
A standard lencseegyenletből
Ahol; d = távolság a tárgytól
i = távolság a képtől
f = az objektív effektív gyújtótávolsága
És a 2. diagramból :
Ahol; q = elválasztási távolság a látható és az infravörös optikai tengely között p = a kép eltolása a látható fókuszsíkban
Egy adott kameránál a q elválasztási távolság és az objektív f gyújtótávolsága rögzített. Ezért a fenti egyenletből a látható kép eltolása csak a céltávolság függvénye. qd infravörös optikai út pid látható fény optikai út
Kép rögzítésekor a teljes látható kép és a teljes infravörös kép az összes járulékos adattal egy képfájlban kerül mentésre a fényképezőgép memóriakártyáján. A látható képnek az a része, amely nem jelenik meg, és amely a kép készítésekor a megjelenítési méreteken kívül esik, a látható kép részeként kerül mentésre. Később, ha az infravörös és a látható kép közötti regisztráció utófeldolgozási módosítására van szükség egy PC-n, a teljes látható kép elérhető az ilyen beállítások elvégzéséhez.
Következtetés
A látható és infravörös optikájú kamerák parallaxis problémájának megoldásának újszerű megközelítése olyan kereskedelmi kamerát eredményezett, amely jelentősen javítja a teljesítményt és a hasznosságot a prediktív karbantartási és épülettudományi alkalmazásokban. Különösen nagymértékben javítja az infravörös képek térbeli részleteit, és segít az infravörös érdekes pontok pontos helyének meghatározásában.
Elismerés
A szerző, Roger Schmidt szeretné elismerni az Infrared Solutions, Inc. Engineering Team kivételes munkáját ennek az egyedülálló fényképezőgépnek a feltalálásában és fejlesztésében. A csapatot Kirk Johnson és Tom McManus vezette, és támogatta Peter Bergstrom, Brian Bernald, Pierre Chaput, Lee Kantor, Mike Loukusa, Corey Packard, Tim Preble, Eugene Skobov, Justin Sheard, Ed Thiede és Mike Thorson. A szerző szeretné köszönetet mondani Tony Tallmannak a PC-szoftverért végzett munkájáért, amely megkönnyítette ezeknek a leleplező képeknek az újságban való közzétételét.

